DIRECT DIGITAL SYNTHESIZERS (DDS)
SYNTHETISEURS DIGITAUX A SYNTHESE DIRECTE
F6EHJ
L’apparition des DDS est en train de
révolutionner le monde des télécommunications et ouvre aux amateurs des
perspectives jusqu’alors inaccessibles.
L’objet de cet article est d’approcher
(d’apprivoiser) progressivement les DDS par leur mise en oeuvre dans des
applications amateurs qui ne sont pas des professionnels de l’électronique ou
de l’informatique, mais qui ont d’abord l’envie d’apprendre et qui disposent de
quelques bases, je pense notamment aux radioamateurs…
La théorie du fonctionnement ne sera abordée que
lorsqu’elle se révèlera indispensable à la mise en oeuvre.
C’est donc sous l’aspect pratique que cette article
aborde le sujet; il fournit les bases nécessaires à la réalisation d’un
générateur HF ou encore celle d’un VFO de récepteur.
Puis, seront exposés les avantages et
inconvénients (vécus) des DDS ainsi que les solutions palliatives envisagées.
Pour terminer, la réalisation pratique d’un générateur BF/HF pouvant être
utiliser en VFO ou même émetteur CW QRP sera décrite en détail avec les schémas
et plans des circuits imprimés.
1. Qu’est ce qu’un DDS:
Pour faire simple, je dirai que c’est une “
petite boîte noire” qui permet de générer un signal sinusoïdal à fréquence
variable avec une très grande stabilité alliée à une très grande résolution,
c’est à dire avec des incréments de fréquence très faibles.
Le terme sinusoïdal est cependant inexact car le
signal de sortie est issu d’un convertisseur digital/ analogique 10 bits.
Aussi, la forme du signal est une succession de paliers formant une sinusoïde.
L’observation à l’oscilloscope ne permet pas de discerner ces paliers, mais ils
existent et nous y reviendrons.
La définition du DDS pourrait être en quelque
sorte celle d’un VFO Geloso, encore utilisé de nos jours ou encore d’un
oscillateur type Colpitts ou Hartley avec la stabilité en moins...
Plus près de nous, le PLL avec ses parfois
capricieuses boucles de verrouillage de phase
Voyons chacune des caractéristiques énoncées.
1.1.
La stabilité:
Le DDS requiert une horloge de référence pour
élaborer son signal de sortie. La stabilité du signal généré par le DDS
reposera entièrement sur ce signal d’horloge. Ce signal sera fourni par un
oscillateur à quartz.
Si l’on prend comme exemple un signal de
référence de 125 MHz et un signal de sortie du DDS de 12.5 MHz, une dérive de
10 Hz de l’horloge affectera le signal utile de 1Hz… !
1.2. Fréquence du signal:
La fréquence de l’oscillateur à quartz qui
pilote le DSS est dépendante de deux paramètres:
- la fréquence maximale admissible par le DDS
lui-même
- la fréquence maximale du signal souhaité.
Bien que la fréquence théorique utile (Nyquist)
soit égale à la moitié de la fréquence de l’horloge on prendra comme règle de
base : fréquence de l’oscillateur égale ou supérieure à 3 fois la
fréquence maximale de sortie désirée.
Cette règle simple permet alors de choisir a
priori le DDS qui convient.
Quelques exemples:
- Soit à remplacer le VFO d’un transceiver dont
la stabilité et la précision de fréquence sont jugés insuffisantes.
Le VFO fournit un signal entre 5 et 5.5 MHz.
La fréquence haute est donc 5.5
MHz, un oscillateur de 16.5 MHz est le minimum autorisé, un DDS acceptant un
signal d’horloge à 15/20 MHz sera retenu en configuration minimale.
- Soit un transceiver couvrant les bandes
amateur (1.8/29.7 MHz) possédant un seul changement de fréquence avec une Fl à 9MHz.
Dans ce cas, le VFO doit couvrir la plage de
10.8 à 38.7 MHz. C’est déjà beaucoup plus difficile pour un VFO classique.
Dans ce cas, la fréquence de l’oscillateur du
DDS devra être au minimum de 38.7x3 soit 106.1 MHz, ce qui nécessite un DDS
acceptant 100 MHz. Ce dernier exemple peut également être appliqué pour un
récepteur à conversion directe requérant un VFO de 0 à 29.7 MHz; la fréquence
de l’horloge se retrouve alors à 90 MHz.
Cependant, comme règle
générale, plus la fréquence utile sera éloignée de la fréquence maximale du
DDS, meilleure sera la qualité du signal.
Les DDS récents admettent des signaux d’horloge
à 125 , 180 voire 300 MHz, ce qui permet d’obtenir des signaux utiles jusqu’à
100 MHz.
Malheureusement, leur disponibilité en petite quantité et leur prix ne
permettent pas toujours à l’amateur de se lancer dans des montages requerrant
leur utilisation.
Afin de pouvoir appliquer ce qui sera
exposé, le DDS AD9850, disponible chez les revendeurs sera le seul utilisé.
1.3. Résolution:
La résolution est l’incrémentation minimal de la
fréquence du signal de sortie.
Elle dépend directement de la fréquence de
l’horloge et du DDS lui-même.
Pour une fréquence d’horloge de 125 MHz, la
résolution disponible est égale à.. 0.0291 Hz I
1.4. Conclusion:
Obtenir un signal de fréquence variable entre 0
et 40 MHz, par pas de 0.0291 Hz minimum possédant la stabilité d’un quartz.. On
est bien proche de l’oscillateur idéal.
Cet oscillateur est maintenant à notre portée.
Profitons en!
2. Mise en oeuvre:
Il ne faut pas s’attendre à trouver des selfs et
des condensateurs variables avec le DDS: le DDS est un composant qui requiert
très peu d’éléments externe : dans le montage proposé, seuls 3 résistances et 4 condensateur de découplage
seront nécessaires pour le DDS.
Par contre, il ne se commande pas très
simplement, il faut en fait lui parler afin de lui ordonner ce qu’il faut
faire.
2.1. Le boîtier:
Il s’agit, vous l’aurez tous deviné, d’un
circuit intégré a nombre de pattes variable, pour ceux que je connais, entre 16
et 44.
Comme indiqué précédemment, nous nous bornerons
à retenir un seul modèle fabriqués par Analog Device: l’ AD 9850.
Une parenthèse cependant : l’AD9835 est un modèle plus rustique admettant
une fréquence d’horloge de 50 MHz ; l’AD9851 est au contraire plus
performant (180 MHz) mais ces deux composants restent quasiment introuvables.
L’AD9850 possède 28 pattes. Autant dire de suite
qu’une des difficultés est la taille de la bête car ce sont des boîtiers SSOP
ou “ultra small SSOP”. Ca promet et ce n’est rien de le dire...!
La taille hors tout est de l’ordre de 10mm X
7mm, la distance entre patte de 1mm !
2.2. L’ AD 9850:
C’est le premier DDS que j’ai utilisé et sa mise
en œuvre est à la portée de l’amateur
moyen comme l’auteur.
Ce DDS admet une horloge à 125 MHz ce qui
décline un signal de sortie de fréquence maximale autour de 40 MHz.
Après essai, il est possible d’aller au-delà et
il monte à 170 MHz; par contre la consommation augmente rapidement et la
température également.. Je n’ai pas insisté outre mesure.
Le pas minimal d’incrémentation est de 0.03 Hz
avec l’horloge à 125 MHz, la tension de sortie de 1.2V efficaces sur 50 ohms
entre 0.03 Hz et 40MHz....
2.2.1. Les différentes
PIN:
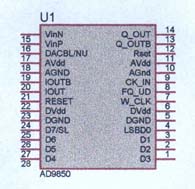
Elles sont au nombre de 28, mais beaucoup
d’entre elles ne sont pas utilisées ou reliées à la masse ou à l’alimentation, il
en résulte que seules les pins suivantes méritent une description:
PIN 7:W_CLCK
C’est la broche qui reçoit l’horloge de travail.
Cet horloge va cadencer le chargement du message « fréquence »
du DDS
PIN8:FQ_UD
Cette broche valide la fin du message de
programmation et indique au DDS qu’il peut prendre en compte ce qui vient
d’être chargé.
PIN 9:CLK_ IN
C’est l’entrée de l’oscillateur de référence à
quartz évoquée ci-avant.
PIN 25: SERIAL DATA IN
Cette entrée reçoit le message de programmation
fréquence.
PIN
21: out
C’est la sortie analogique du DDS (la plus
intéressante...!)
PIN 22: out B
C’est la même que ci-dessus, déphasée de 180°
PIN 11 et 18 : Avdd
Il s’agit de l’alimentation 5V de la partie
analogique
PIN 6 et 23 : DVdd
Il s’agit de l’alimentation +5V de la partie
digitale.
Les autres pins sont soient à la masse, soient
inutilisées et restent en l’air.
Pour mémoire les pins 2, 3 et 4 qui
sont trois des entrées parallèles servent à configurer le DDS en mode série.
Remarques
sur les alimentations :
Comme décrit ci-dessus, le 9850 requiert deux alimentations +5V : une pour
sa partie digitale et une pour sa partie analogique. Ceci complique le dessin
du circuit imprimé et nécessite un filtrage séparé des deux sources 5V.
Il est possible de s’en affranchir en ignorant cette particularité et en
alimentant les 4 pins par le +5V.
La contre partie de cette simplification est l’accroissement de signaux
parasites en sortie du DDS.
En fonction des besoins en pureté
spectrale, on optera pour l’une des deux solutions.
Dans tous les cas, le découplage des 4
pins d’alimentation (6, 11, 18, 23) sera soigneusement réalisé au ras de chaque
pin. Des condensateurs chip de 10 à 100 nF seront de préférence employés.
Pour conclure sur cette énumération, on s’aperçoit que tout compte fait, elle
n’est pas très longue et qu’il n’y a pas lieu de s’affoler…
2.2.2. PRINCIPE DE FONCTIONNEMENT:
Il est indispensable de comprendre ce
qu’il est nécessaire de faire avant de démarrer.
Trois étapes sont nécessaires :
1. Elaboration de la fréquence désirée:
La génération de fréquence repose sur le chargement d’un registre à 32 bits
situé dans le DDS.
Ce mot de 32 bits (4 octets) est entièrement représentatif de la fréquence du
signal de sortie.
Il est donc nécessaire de le définir,
de le générer et de le charger dans le DDS. Ces 3 opérations sont
les seules (ou presque) à réaliser.
2. Définition du message fréquence
32 bits:
Il est défini par la formule suivante:
F out= Fxtal X N/2exp 32 (Fxtal =
fréquence de l’oscillateur horloge)
On en déduit simplement N :
N= Fout x 2exp 32 / Fxtal
Exemple: Soit à générer un signal de sortie de 5.250 023 MHz avec un DDS muni
d’un oscillateur d’horloge à 100 MHz
N= 5250023 Hz x 4294967296/100 000 000 =
225 488 771
Cette valeur est à convertir en hexadécimal, soit 0D 70 A7 B3. On complète avec
des zéros si nécessaire afin d’obtenir les 32 bits requis. C’est tout.
Voir le tableau Excel en
exemple
3. Génération du message de 32 bits:
Ce message de 4 octets va devoir prendre
une consistance logique car pour l’instant, il n’est que le résultat d’un
calcul arithmétique.
A ce stade, il est nécessaire de
comprendre comment il va falloir s’adresser au DDS pour lui faire connaître ce
message (notre objectif).
Pour entrer le message dans le DDS, deux
solutions s’offrent à nous:
 Le mode parallèle:
Le mode parallèle:
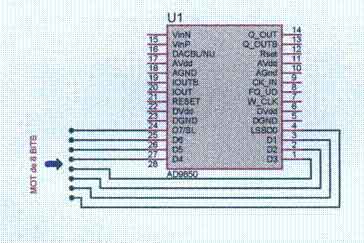
Le DDS
possède 8 entrées (8 fils correspondant chacun à un bit d’un octet). Comme le
mot “fréquence” comporte 4 octets (32 bits), le DDS accepte que l’envoi se
fasse en 4 fois, c’est à dire un octet après l’autre.
Par contre, il demande que ce soit
l’octet de poids faible qui soit présenté en premier. Si l’on reprend l’exemple
calculé précédemment, les différentes octets à charger vont se présenter ainsi:
Mot de 32 bits: 0D 70 A7 B3
Hex Binaire
1er octet: B3 1011 0011
2ème octet: A7 1010 0111
3ème octet: 70 0111
0000
4ème octet 0D 0000 1101
Ceci est juste pour mémoire car ce n’est pas ce mode que nous utiliserons car
il requiert un bus complet de 8 bits, denrée particulièrement rare dans les
microcontrôleurs récents bon marché.
Le mode série
Cette fois, c’est le bon...’
L’entrée se fait sur un seul fil et
c’est suffisant puisque les 32bits vont se succéder à la queue-leu-leu. C’est
le rôle de l’entrée SERIAL_DATA_ IN pin 25.
Le DDS demande également à ce que le premier bit
soit de poids le plus faible.
Si l’on reprend le résultat trouvé précédemment,
le message est le suivant en partant de la gauche:
11001101 00010101 00001110 1011000
Noter l’ordre des bits, poids faible de l’octet
de poids faible en premier.
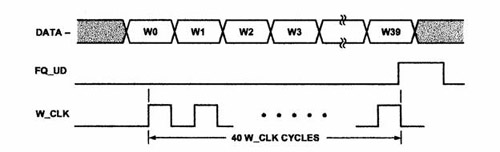
Par contre, l’envoi des bits ne doit pas se
faire n’importe comment : il est nécessaire de les synchroniser avec une
horloge. Ce signal sera appliqué sur l’entrée W_CLK pin 7.
Non seulement l’envoi des bits doit être
synchronisé avec l’horloge de travail, mais encore faut il prévenir le DDS
quand le chargement commence et à quel moment il peut prendre en compte
celui-ci.
Il faut en effet que la totalité des 32 bits ait
eu le temps d’arriver dans le registre fréquence...
C’est le rôle de l’entrée FQ_UD qui recevra un
signal en début et en fin de chargement.
A l’issue de ce processus qui va demander
quelques microsecondes, la fréquence correspondante sera disponible en sortie.
C’est tout… !
3.
INTERFACAGE DU DDS
Toutes les opérations énumérées ci-dessus vont devoir être réalisées de
très nombreuses fois : par exemple à chaque mouvement du « bouton
fréquence » d’un VFO, donc elles doivent être automatisées et effectuées dans
un temps minimal.
Les 32 bits, le signal d’horloge de travail et
le signal de validation vont devoir être générés et l’opération sera terminée
pour la fréquence définie.
Le recours à la logique câblée TTL/MOS pourrait
être une des solutions mais le nombre de fréquences différentes serait vite
limité. Aujourd’hui la technologie nous offre des opportunités beaucoup plus
performantes permettant une très grande souplesse de fonctionnement.
Je veux parler ici des microcontrôleurs. Le mot
est lâché et il va falloir faire avec ces nouveaux composants qui deviennent
rapidement indispensables!
3.1.
LE MICROCONTROLEUR:
Je ne parlerai ici que de la famille des PIC de
Microchip qui sont les seuls µcontrôleurs que j’ai expérimentés.
Pour faire simple, nous prendrons le plus simple
- mais pas le moins performant de la famille- je veux citer le PIC 16F84.
L’intérêt de ce composant est d’abord son coût
(7€ environ) et sa capacité à posséder une mémoire flash c’est à dire
programmable et effaçable à volonté de 1 Koctet environ (1024 mots de 14 bits
en réalité).
Le PIC possède 13 entrée/ sorties réparties en 5
fils pour le port A (RA0 à RA4) et 8 fils pour le port B (RB0 à RB7).
Je passe sous silence les fonctions
complémentaires (timer, interruption...) dans l’immédiat.
Cette pléthore d’entrées /sorties va être
largement suffisante pour commander le DDS qui ne requiert que 3 fils.
Par contre, si l’envie nous prenait de disposer
d’un affichage digital de la fréquence de sortie, les autres E/S nous serait
d’un grand secours.
Si par ailleurs, il était nécessaire de changer
la fréquence du DDS (pour recevoir des stations différentes par exemple dans le
cas d’un VFO), encore une fois les E/S seraient les bienvenues pour gérer un
codeur mécanique ou optique par exemple.
J’arrête la l’énumération car je suis persuadé
que ça vous donne des idées...!
D’autre part, le PIC lui aussi requiert un
signal d’horloge qui peut être fourni par un quartz ou un simple réseau RC. Une
alimentation +5V permet d’alimenter le PIC (quelques mA).
Dans l’immédiat on en reste au DDS dans sa mise
en oeuvre la plus simple.
3.2.
INTERFACAGE MATERIEL DDS/ µcontrôIeur:
Il faut donc relier le DDS avec le PIC.
Comme évoquée à l’instant, cette liaison est des
plus simple puisque 3 fils de commande sont seulement nécessaires pour piloter
le DDS:
SERIAL_DATA vers
RA0
W_CLK vers RA1
FQ_UD vers RA2
Le choix des trois ports RA0 à RA2 est
complètement arbitraire, on décide ce que l’on veut parmi les ports
disponibles.
La platine d’essai
se présente alors sous cette forme:
On remarquera quelques points
particuliers :
- Les alimentations :
A partir d’une source 15 à 18V (petit bloc secteur), deux régulateurs
fournissent le +12 et le +5V.
L’alimentation +12V est uniquement destinée à l’amplificateur de sortie.
L’alimentation +5V est séparée en deux pour fournir le +5V aux parties
analogique (+5A) et digitale (+5D). On notera les condensateurs C4 à C7 qui
seront placés près des fils d’alimentation du 9850.
- Les liaisons PIC/DDS :
Pour ne pas charger le schéma, les
fils entre le PIC et le DDS ne sont pas figurés. Il suffit de repérer les
entrées sorties de l’un et de l’autre pour « visualiser » les
connexions.
Autant dire que ce schéma n’autorise aucune
commande externe pour faire varier la fréquence ni son affichage. Il pourra
être cependant utilisé pour réaliser un oscillateur à fréquence fixe dont la
valeur pourra cependant être changée ou ajustée selon le besoin.
3.2.
LOGICIEL:
Evidemment, il faut en passer par là. Ce n’est
pas bien compliqué, puisque j’y suis arrivé sans vraiment être un spécialiste,
ni tombé dedans tout petit.
L’éditeur utilisé est MPLAB, l’assembleur est MPASM disponible tous deux en
libre service sur le site Microchip. Attention les fichiers ont une taille
respectable…
Que faut-il faire? Résumons les différentes
étapes:
3.2.1. générer les 32 bits, soit 4 octets.
Il n’y a pas plus simple. Il suffit de charger
le contenu des 4 octets (hexa) dans 4 emplacements mémoire que l’on aura
définis préalablement. Nous les appellerons ACCO, ACC1, ACC2 et ACC3. On en
prendra un cinquième ACC4 qui sera toujours à zéro pour faire plaisir au DDS
afin de ne pas le désorienter...! (en réalité ce 5ème octet permet
de commander la phase du signal de sortie, sans intérêt pour notre
application).
Pour l’exemple, la valeur retenue sera chargé
dans ces variables dès l’initialisation du PIC par la fonction “define”:
define ACCO h’B3’
define ACC1 h’A7’
define ACC2 h’70’
define ACC3 h’0D’
define ACC4 0
Voilà, c’est fait une fois pour toute ;
pour changer de fréquence, il faudra modifier ces valeurs, manuellement pour
l’instant.
3.2.2.
créer l’horloge de travail:
Il n’y a pas plus simple. ..Nous avons décidé que
l’entrée W_CLK du DDS serait attaquée par RA1
Il suffit de mettre alternativement ce bit à 1
puis à 0 pour créer un magnifique signal carré en sortie de RA1.
Deux instructions pour cela sont nécessaires:
BSF RA1 (Bit Set variable) met le bit de RA1 à 1
BCF RA1(Bit Clear variable) met le bit de RA1 à 0
Pour recommencer, il suffit de se repositionner
à la première instruction.
3.2.3.
créer le signal de validation:
C’est identique à ci-dessus. Nous avons choisi
RA2 pour attaquer l’entrée FQ_UD du DDS. Les deux instructions utilisées
précédemment vont remplir le même rôle.
BSF RA2
BCF RA2
3.2.4. envoi des 32 bits:
comme nous l’avons vu tout à l’heure, le
microcontrôleur ne peut traiter que des octets, ses registres étant limités à 8
bits. C’est la raison pour laquelle nous avons découpé le mot de 32 bits à
destination du DDS en 4 octets (ACC0. . .ACC3). Il sera donc nécessaire de
charger séquentiellement ces 4 octets en commençant par le bit le moins
significatif (LSB) de l’octet de poids le plus faible.
En interne du microcontrôleur, les bits sont
dans les registres mémoire ACC0..ACC3 de 8 bits, il sera donc nécessaire des
les sortir un par un, puis de les envoyer l’un
après l’autre vers le DDS.
L’ opération de chargement doit se faire en
synchronisme avec l’horloge de travail et le signal de validation.
Ceci ne complique pas vraiment la procédure mais
nécessite de séquencer les différents évènements et particulièrement l’horloge
et les données.
Le DDS prend en compte la donnée (1 bit du
message) sur un front montant de l’horloge de travail.
La procédure globale est la suivante:
- lire l’octet de poids faible ACC0
- décaler l’ensemble des bits vers la droite
cette opération permet de récupérer le bit
‘sortie de l’octet’ dans un bit d’un registre spécifique du µcontrôleur: la
carry (ou retenue). Cette carry contiendra donc alors le bit à envoyer au DDS
dont la valeur sera...binaire, 1 ou 0.
- faire monter l’horloge de travail à 1
- mettre l’horloge de travail à 0
Voilà pour le premier bit. Il faut refaire
l’opération 32 fois, sachant que tous les 8 bits, il faudra changer d’octet
(ACCO puis ACC1 .. ..ACC3).
Voyons en détail le sous programme ci-dessous:
|
LDBYTE |
|
C’est le nom (étiquette) du sous-programme
qui permettra de l’appeler |
|
|
|
|
|
|
MOVLW 8 |
Pour charger un octet bit par bit,
il faut faire l’opération 8 fois. On se servira d’un compteur de bit
initialisé à la valeur 8. |
|
|
|
|
|
|
MOVWF COUNT |
Le
registre W étant utilisé en permanence pour les besoins internes du µ, on se
dépêchera de transférer le contenu de W dans un registre temporaire
mémoire : COUNT |
|
|
|
|
|
|
BCF W_CLK |
Instruction décrite précédemment,
l’horloge de travail est mise à O |
|
BIT |
BCF DATA |
La sortie DATA (entrée SERIAL du
DDS) est mise à zéro |
|
|
RRF TEMP,1 |
L’octet contenu dans TEMP est décalé
d’un rang vers la droite et tombe dans la CARRY |
|
|
BTFSC CARRY_BIT |
Voyons le contenu de la CARRY (1
ou 0). Si 1 on passe à l’instruction suivante (BSF DATA), sinon on la saute
pour aller directement à BSF W CLK |
|
|
BSF DATA |
Si 1 on met le data à 1 sinon on
ne fait rien data=0 puisqu’il est déjà à 0 |
|
|
BSF W_CLK |
On fait monter à 1 le signal de
l’horloge de travail. |
|
|
BCF W_CLK |
On le fait redescendre pour
terminer le c cie |
|
|
DECFSZ COUNT,1 |
Le 1er bit a été envoyé, on
décrémente le compteur de bit |
|
|
GOTO BIT |
Et on retourne charger le bit
suivant à l’étiquette BIT pour l’instruction BCF _DATA |
|
|
RETURN |
Tant que le compteur de bit n’est pas
à 0, on continue à charger les bits les uns après les autres. Les 8 bits
chargés, on passe à l’octet suivant. |
Afin d’économiser les variables (la place
mémoire), les 4 octets seront tour à tour transférés dans une variable temporaire
TEMP qui sera utilisée par le programme précédent LDBYTE. C’est le but du
sous-programme suivant :
|
LD9850 |
|
|
|
|
MOVF ACCO,W MOVWF TEMP CALL
LDBYTE |
transfert ACCO dans le registre W transfert
W dans TEMP appelle le S/P de chargement d’un octet |
|
|
|
|
|
|
MOVF ACC1 ,W MOVWF TEMP CALL
LDBYTE |
transfert ACC1 dans le registre W
transfert W dans TEMP appelle le S/P de chargement d’un octet |
|
|
|
|
|
|
MOVF ACC2 ,W MOVWF TEMP CALL
LDBYTE |
transfert ACC2 dans le registre W
transfert W dans TEMP appelle le S/P de chargement d’un octet |
|
|
|
|
|
|
MOVF ACC3 ,W MOVWF TEMP CALL
LDBYTE |
transfert ACC3 dans le registre W transfert
W dans TEMP appelle le S/P de chargement d’un octet |
|
|
|
|
|
|
MOVF ACC4 ,W MOVWF TEMP CALL
LDBYTE |
transfert ACC4 dans le registre W
transfert W dans TEMP appelle le S/P de chargement d’un octet |
|
|
|
|
|
|
BSF FQ_UD |
|
|
|
BCF FQ_UD |
|
|
|
RETURN |
|
Une fois les 4 octets(S) sérialisés bit par bit
(32/40), il ne reste plus qu’à signaler au DDS que l’opération est terminée en
faisant monté le signal FQ_UD à 1. On n’oublie pas de le remettre à 0 pour être
prêt la fois suivante.
..
BSF F0_UD set
Iatch pulse
BCF
FQ_UD reset
latch pulse
Il ne reste plus qu’à introduire ce programme
dans le PIC (le programmer) et dès le reset, le programme s’exécutera en
quelques microsecondes.
Le DDS doit alors générer la fréquence de 5, 250
023 MHz.
Bon, ce n’est pas extrêmement simple mais ce
n’est pas bien compliqué. Ce module est le coeur du chargement du DDS et si ce
n’est pas le seul moyen d’y arriver, cette solution est très souple.
Evidemment, ce programme atteint rapidement ses
limites car la fréquence générée ne peut être changée que par altération
manuelle des 4 variables ACCO à ACC3. Ce serait bien de pouvoir la faire varier
facilement par une commande accessible, un bouton par exemple...
Par ailleurs, il serait agréable de connaître la
fréquence de sortie car même si on se souvient du contenu des 4 octets, à moins
de parler hexadécimal couramment et de faire les conversions octets / fréquence
instantanément, il sera difficile de la mémoriser.
4. L’AFFICHAGE DE LA
FREQUENCE:
C’est une nouvelle étape, pas plus complexe.
Pour rester dans des coûts abordables tout en
bénéficiant d’un affichage correct, mon choix s’est porté sur un afficheur à
cristaux liquide (LCD) de 2 lignes de 16 caractères chacune.
Il en existe de nombreux modèles et celui que
j’utilise couramment est produit par
HITACHI.
Il possède
son gestionnaire d’entrées/ sorties et le générateur de caractères est intégré
et programmable (je l’ai utilisé tel quel).
Interfaçage:
L’afficheur qui comporte 16 broches nécessite 11
fils pour sa commande:
- un bus de donnée de 8 fils (1 octet)
- un fil
RS (selecteur de registre)
-
un fil E (enable)
-
un fil R/W qui ne sera pas utilisé
Les 5 autres fils sont utilisés pour l’alimentation,
le contraste et la masse. Certains modèle un peu plus coûteux possèdent un
rétro-éclairage bien pratique en lumière ambiante insuffisante qui mobilisent
alors les deux fils restants.
La commande d’un tel afficheur n’est pas des
plus simple et je ne m’étendrais pas davantage dessus car ceci présente peu
d’intérêt.
Une des difficultés majeure est due à la lenteur
de ce composant qui nécessite d’attendre entre chaque commande, sous peine
d’échec.
A savoir que l’on trouve des sous-programmes tout
prêt qu’il suffit d’adapter (avec plus ou moins de bonheur parfois) à la
configuration matérielle utilisée. Pour ma part, j’ai entièrement réécrit cette
partie.
Par ailleurs, compte tenu du faible nombre de port disponible sur le
microcontrolleur, il est souvent nécessaire d’avoir recours à une extension
hardware qui permet de commander l’afficheur avec seulement 3 fils. C’est le
rôle du 74HC595 utilisé ici.
L’insertion de ce composant permet d’économiser
les ports d’entrée/ sortie mais la complexité du logiciel s’accroît un peu.
Ces 3 fils seront :
- SERIAL DATA IN (on n’invente rien)
- CLK_595 (c’est la W_CLK du DDS..)
- LATCH (c’est le FQ_UD du DDS…)
Rappelons à ce moment, que pour le DDS, en
l’absence de signal FQ_UD, les données chargées ne seront pas prises en compte,
c’est comme si rien n’avait été envoyé.
Pour le 595, la règle est la même: tant que
LATCH n’est pas activé, les données chargées sont inutiles.
Dans cette configuration, rien ne nous empêche
de faire transiter les données (SERIAL_DATA_IN) à destination du DDS ou du 595
par le même fil...!
5. LA COMMANDE DE LA
FREQUENCE :
Bien évidemment, disposer d’une seule
fréquence présente peu d’intérêt, la
commande de variation de la fréquence doit donc pouvoir être faite manuellement
par l’utilisateur et à sa guise.
Cette variation de fréquence se caractérise par trois paramètres :
5.1.
La plage ou les plages de fréquences à couvrir :
Dans l’hypothèse d’un VFO, cette plage pourra
par exemple être limitée de 5.0 à 5.5 MHz.
Dans l’hypothèse d’un générateur HF, cette plage
sera beaucoup plus importante : # 0
à 40 MHz par exemple.
Dans la dernière hypothèse de l’oscillateur
local d’un récepteur OM, il faudra considérer une excursion de fréquence de 500
kHz par bande, soit 9 plages (voire plus).
5.2.
Le pas
C’est la variation de fréquence par « tour
de bouton ». Plus précisément, c’est la valeur de l’incrément unitaire de
fréquence.
Cet incrément dépendra de l’utilisation du DDS et pour un VFO par exemple, la
tentation sera grande de viser un incrément très faible. Une valeur de 1Hz
semble souvent paraître idéale.
A ce stade, il faudra prendre en compte les conséquences d’un tel choix ;
en effet, une excursion de 1kHz (ce qui est peu), impliquera 1000 chargements
du DDS en quelques secondes ou millisecondes ! On voit qu’alors le
microcontrôleur aura fort à faire et il n’est pas certain qu’il puisse assumer
cette lourde tâche en si peu de temps.
On le constate quelques fois sur certains équipements ou le vernier fréquence
semble « patiner » lorsqu’il est rapidement actionné (vérifiez sur
votre transceiver…. !) conséquence : il faudra trouver le compromis
qui satisfasse l’utilisateur tout en conservant une marge au microcontrôleur.
Dans la pratique, un pas de 10Hz est généralement considéré comme
« standard » et à cette valeur d’incrément, la note d’un signal CW
est réglée sans discontinuité à l’oreille.
Le corollaire
d’une faible valeur de pas est l’excursion de larges plages de
fréquences. Si l’on considère un pas de 10 Hz et 20 pas par tour de bouton,
soit 200Hz par tour, 2500 tours de bouton seront nécessaires pour balayer une
plage de 500 kHz…. ! C’est beaucoup.
Dans ce cas, il sera préférable de passer à une valeur supérieure du pas :
100 Hz, 1kHz, voire 10kHz.
5.3.
La préselection :
Elle devient nécessaire pour couvrir des plages
de fréquences faibles, éloignées les unes des autres ; c’est typiquement
le besoin d’un oscillateur local couvrant les 100 à 500 kHz des bandes amateurs
(3.5 à 3.8, 7 à 7.1 etc…).
Dans ce cas, il sera judicieux de pouvoir caler
le début de l’excursion en début de bande afin
de ne pas avoir à balayer les inter-plages.
Il pourra en être de même pour un générateur HF destiné au réglage d’un
récepteur couvrant les seules bandes amateurs.
On voit donc qu’en plus de la commande de la
fréquence proprement dite, deux commandes seront nécessaires : pas et
bandes. Des boutons poussoirs rempliront parfaitement cette fonction et feront
appel aux interruptions du PIC.
6. MESURE OU GENERATION
DE LA FREQUENCE ?
De prime abord, on pourrait opter pour une
mesure de la fréquence issue du DDS et son affichage direct. C’est la solution
utilisée jadis lors de l’apparition des premiers VFO digitaux.
Elle nécessite la mise en œuvre d’un compteur / fréquencemètre, pas obligatoirement
évidente à implanter dans le microcontrôleur ou à part.
Il est aussi possible de fonctionner en aveugle : on se cale sur une
fréquence initiale et ensuite on compte le nombre de pas envoyés au DDS. Il
suffit d’incrémenter simultanément la valeur de l’affichage du pas courant.
Cette solution (que j’ai utilisée) à un inconvénient majeur : celle d’être
inexacte. En effet, le pas DDS n’est jamais
un nombre entier (rappelez-vous la formule). Par contre, l’incrémentation de
l’afficheur est toujours une valeur
entière (un digit). Aussi, après un certain nombre de pas, il s’introduit un
décalage entre la fréquence issue du DDS et celle affichée et ceci
proportionnellement au nombre de pas effectués depuis la fréquence de départ.
La différence peut ne pas être très importante mais elle s’avère gênante car la
fréquence affichée n’est jamais exacte….
La solution est de prendre le problème à l’envers ! On affiche d’abord la
fréquence puis on la convertit en valeurs DDS.
Ce n’est pas vraiment compliqué car il suffit alors de prendre le poids
individuel de chaque digit (10Hz, 100Hz, 1kHZ …) et de le multiplier par
la valeur affichée.
Le poids de chaque digit sera initialisé une
fois pour toute en fonction de l’horloge DDS. Pour une horloge à 125 MHz on
aura par exemple :
10Hz 01
58
100Hz 0D 6C
1kHZ 86 37
10Khz 05 3E 29
100kHz 34
6D 9C
1MHz 02
0C 48 13
10MHz 14
7A D0 BF
En supposant que la fréquence lue sur l’afficheur soit de 14 001.73 kHz, la
formule suivante fournit les 4 octets nécessaires au DDS :
3(01 58)+7(0D 6C)+(86 37)+4(02 0C 48 13)+(14 7A
D0 BF)
Cette opération sur 32 bits n’est pas des plus simples avec un microcontrôleur
8 bits mais on y arrive !
A ce stade, on a donc généré un signal DDS égal à la fréquence affichée et ce
n’est déjà pas si mal. Pour un générateur HF c’est suffisant, pour un
oscillateur local ou un VFO, ce n'est pas terminé...
Eh oui, la fréquence de l’oscillateur local ou du VFO n’est jamais égale à la
fréquence à recevoir…(sauf pour la conversion directe). Il va donc être
nécessaire de décaler la fréquence du DDS d’une « certaine » valeur…
Calcul de la valeur de décalage (Offset)
On prendra pour exemple une FI à 5645 kHz. Dans
ce cas, la fréquence de l’oscillateur local générée par le DDS pourra être
supérieure ou inférieure de 5645 kHz à la fréquence affichée.
Il suffit alors de soustraire ou d’ajouter la valeur 5645 kHz (BE 91 8F 0B) à
la valeur afficheur avant de la charger dans le DDS.
En réalité….ce n’est pas si simple car il faudra tenir compte de la bande
latérale utilisée !
Dans l’utilisation d’un filtre FI unique, la réception de l’une ou l’autre des
bandes latérales s’effectue par changement de la fréquence du BFO, fréquence
que l’on place de part et d’autre des fréquences de coupures du filtres. Il en
résulte un décalage qui se traduisait jadis par la présence de deux repères
distincts sur le vernier des fréquences.
Si l’on souhaite conserver un affichage exacte de la fréquence générée par le
DDS, il est donc nécessaire de se décaler en fonction de la bande latérale
reçue. En fait, « c’est comme si » la fréquence du filtre FI
changeait.
Pour l’exemple considéré, on trouve 5645 kHz pour USB et 5642.060 kHz pour LSB.
Ces deux valeurs seront donc additionnées ou soustraites avant chargement du
DDS.
Dans l’hypothèse d’un second changement de
fréquence, le principe est identique, seul un oscillateur fixe supplémentaire
pour descendre de la première à la seconde FI est nécessaire.
Par contre, le décalage reste le même.
A l’issue des opérations détaillées précédemment,
on dispose d’un VFO dont, la fréquence affichée est égale à la fréquence
générée plus ou moins les fréquences BFO (et inversement) quelque soit la bande
latérale utilisée.
Autant dire que le plus gros est fait…. !
Sans le décalage FI on dispose d’un oscillateur
pour récepteur à conversion directe ou encore d’un générateur HF, sachant que
seule la programmation du microcontrôleur est à adapter en fonction du besoin.
Cette programmation pourra être également adaptée à la fréquence FI utilisée
(10 .7 MHz, 9MHz, 4.9 MHz, 455 kHz..) pour ne citer que les plus
courantes, toutes les valeurs pouvant évidemment être prise en compte.
A ce propos, il faudra cependant prendre en compte les limites du DDS annoncées
précédemment, à savoir que la fréquence de sortie maximale sera égale à F
Horloge /3, soit 40 MHz pour une horloge à 125 MHz.
On s’aperçoit alors que l’utilisation d’une FI à 10.7 MHz amène le DDS à 40 MHz
pour la bande 10 mètres. Si la bande 50 MHz était visée, il faudrait préférer
le mélange soustractif (50-10.7) afin de rester à l’intérieur de la plage de
fréquence « utile » du DDS.